32 Schwerpunkt:
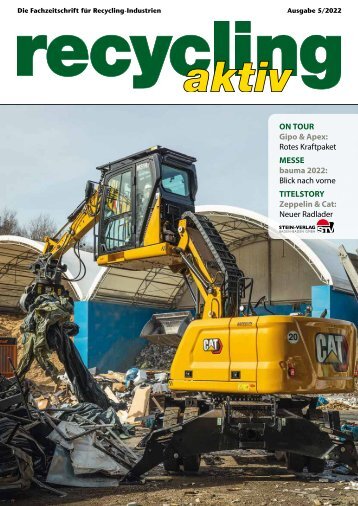
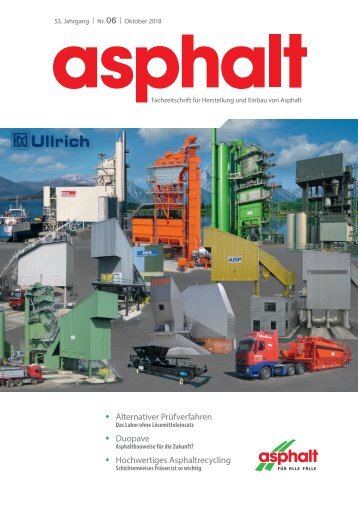
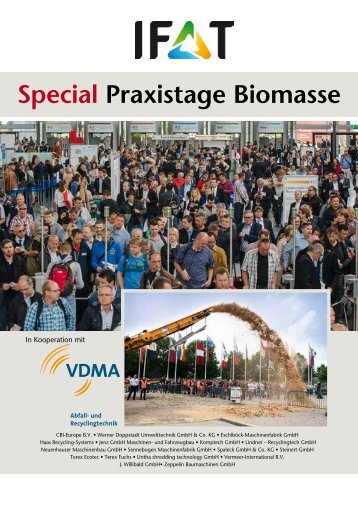
32 Schwerpunkt: Digitalisierung – Teil 1 Abb. 3: 3D-Fräsen mittels Tachymetersteuerung auf der Pilotstrecke „L1138 Freiberg–Benningen“ liche Wertschöpfung für die Wiederverwendung des Ausbauasphaltes zu erreichen. Lokale Schadstellen in Schichten unterhalb der zu erneuernden Asphaltschichten werden idealerweise ebenso erfasst. Die dafür notwendigen Vorerkundungen des Auftraggebers umfassten bisher • Erfassung und Festlegung von Passpunkten und Zwangspunkten, • Drohnenflüge/hochauflösende Straßenscans zur Ermittlung der bestehenden Quer- und Längsneigungen, Fahrbahnbreiten und Höhenlagen der Bestandsfahrbahn sowie • Georadarmessungen und Bohrkernentnahmen zur Festlegung des Erhaltungsaufwandes und Festlegung von Schichthorizonten zum Fräsen der Schichten. Aus den gewonnenen Daten werden durch den Auftraggeber Deckenbücher generiert. Diese enthalten Informationen über den Aufbauhorizont der bestehenden Fahrbahn, ggf. Zwischenhorizonte aus den Schichtenfolgen von Asphaltschichten der bestehenden Fahrbahn sowie über die künftige Fahrbahnoberfläche. Durch genaue Fräsarbeiten soll ein planparalleler Aufbauhorizont zur späteren Fahrbahnoberfläche geschaffen werden, um den Einbau der Asphaltschichten in konstanter Dicke zu ermöglichen. Der Auftragnehmer muss aus dem übergebenen Deckenbuch ein 3D-Fräsmodell erstellen. Für das profilgerechte Fräsen steht es ihm dann frei, ein Steuerungssystem auszuwählen. Möglich sind hierbei Systeme auf Basis GNSS über Differenzmodelle oder, wie in Abbildung 3 gezeigt, terrestrische Systeme mittels Tachymetersteuerung. Je nach Erfordernis und gewähltem System hat der Auftragnehmer das bestehende Festpunktfeld eigenständig zu ergänzen. Bei Ausführung der Fräsarbeiten zeigte sich oft, dass auf Grundlage von Georadaruntersuchungen bzw. punktuellen Untersuchungen der Bestandsfahrbahn über Bohrkernentnahmen die Schichtenmodelle für die Fräsarbeiten zu ungenau sind. So blieben sehr oft dünne, lose Schichten bestehen, die nochmals aufgenommen werden mussten. In der Folge war die Ausführung der neuen Asphaltschicht auf der gefrästen Unterlage in konstanter Schichtdicke nicht durchgängig möglich. Auch die angewendeten, modernen Steuerungssysteme schaffen hier keine Abhilfe. Die Ursache der Abweichungen zur Planung war auch auf die Wahl der Pilotstrecken zurückzuführen. Bei allen ausgeführten Maßnahmen handelte es sich um Landesstraßen. Diese zeichnen sich oftmals durch einen sehr inhomogenen Fahrbahnaufbau, auch über die Fahrbahnbreite, aus. Die Dicken der Asphaltschichten in der Bestandsfahrbahn wechselten häufig. Die bisher mit dem Georadar durchgeführte Vorerkundungen zeigten sich diesbezüglich noch nicht als ausreichend. Seitens des Auftraggebers wird daher der Umfang der Vorerkundungen nochmals deutlich erhöht [3], um größere Sicherheit bei der Festlegung von Frästiefen zu erhalten. Beim Fräsen selbst musste festgestellt werden, dass die Positionsermittlung der Fräse oftmals zu ungenau war oder gestört wurde. Probleme ergaben sich einerseits aus der Genauigkeit und Konstanz der Satellitenortung, andererseits wurde bei der Steuerung mittels Lasertechnik die Distanzmessung zwischen Tachymeter und Fräse oftmals durch Transportfahrzeuge gestört. Eine optimale Positionierung des Tachymeters erwies sich hier als schwierig. Ebenso musste festgestellt werden, dass aufgrund der permanenten Anpassung der Frästiefe in Abhängigkeit der Position die Fräsleistung deutlich gemindert wurde. Dies stand meist im Widerspruch zur verfügbaren Bauzeit, die bei den Baumaßnahmen stark begrenzt war. Besonders bei Wochenendbaumaßnahmen wurde dadurch die fristgerechte Fertigstellung der Arbeiten gefährdet. Um weiterhin die Vorteile des Fräsens mittels 3D-Steuerung zu nutzen wird vorgeschlagen, den ersten Fräsgang bzw. die ersten Fräsgänge in konstante Dicke unter Berücksichtigung der bestehenden Art der Asphaltschichten durchzuführen. Einzig die geplante unterste Fräslage kann dann mittels 3D-Steuerung gefräst werden, 1|2021
Schwerpunkt: Digitalisierung – Teil 1 33 wohlwissend, dass dann eine Vermischung von Asphaltfräsgut aus unterschiedlichen Asphaltschichten mit unterschiedlicher Qualität erfolgt. Das Problem der losen Schichten, die nachträglich entfernt werden müssen, bleibt bei unzureichender Bestandsaufnahme bestehen. Weiterhin sind bereits bei der Ausschreibung die zusätzlichen zeitlichen Aufwendungen des 3D-Fräsens zu berücksichtigen. Auf der Baustelle werden die permanenten Empfehlungen zur Änderung der Einbaugeschwindigkeit durch das Einbaupersonal sogar oft als störend bzw. irritierend empfunden. Dynamische Logistik- und Einbausteuerung Ein maßgeblicher Baustein von QSBW 4.0 ist die intelligente, dynamische Logistiksteuerung. Diese muss u. a. in der Lage sein, die Abfahrzeitpunkte an der Asphaltmischanlage in Abhängigkeit der Fahrzeit der Transportfahrzeuge zur Baustelle und der geplanten Einbaugeschwindigkeit des Straßenfertigers zu berechnen. Während der Fahrt von der Asphaltmischanlage zur Baustelle muss auf Basis einer genauen Ortung in Echtzeit die Ankunftszeit der Transportfahrzeuge und somit der Materialzulauf prognostiziert werden. Sofern sich eine Verzögerung der Ankunftszeit ergibt, muss die dynamische Logistiksteuerung in der Lage sein, rechtzeitig Empfehlungen für die Reduzierung der Einbaugeschwindigkeiten des Straßenfertigers zu geben. Gleiches gilt auch bei einer möglichen Beschleunigung des Einbaus, wobei dies nur im sehr geringen Maße erfolgen sollte. Somit ergibt sich die fortlaufende Neuplanung des Logistikprozesses. Carl Rumpel_Anzeige Asphalt 2021-01_V5 halbe Seite quer - final.pdf 1 14.01.2021 10:44:54 Am Markt sind diverse Soft- und Hardwarelösungen für eine intelligente Bauprozesssteuerung verfügbar, um die Forderung nach QSBW 4.0 umzusetzen. Der gesamte Prozess ist für den Auftraggeber anhand einer Online-Überwachung sichtbar zu machen. Weiterhin sind an der Asphaltmischanlage ebenso das Wiegesystem einzubinden bzw. die Lieferscheine digital zu erfassen, damit diese in die gewählte Software eingebunden werden können. Um einen Soll-Ist-Vergleich der Einbauleistung permanent digital durchführen zu können, bedarf es einer detaillierten Planung durch den Auftragnehmer, welche im Vorfeld an den Auftraggeber zu übergeben ist. Der Umfang der Planung wird über die Baubeschreibung vorgegeben und umfasst folgenden Mindestumfang: • geplante Tageseinbaumenge/-leistung, • maximal mögliche und tatsächlich geplante Mischleistung der eingesetzten Asphaltmischanlagen unter BANKETT- UND STRASSENBAU Mit über 60 Jahren Erfahrung Ihr Partner für • Maschinelle Bankettherstellung und -pflege • Grader- und Beschickervermietung Lehmkamp 3 • 23701 Süsel Telefon 0 45 24 / 70 30 800 • Fax 0 45 24 / 70 30 80 29 info@rumpel-suesel.de • www.rumpel-suesel.de 1|2021